编程技术-FreeRTOS知识梳理
推荐 原创一、RTOS:Real time operating system,中文意思为 实时操作系统,它是一类操作系统,比如uc/OS、FreeRTOS、RTX、RT-Thread 这些都是实时操作系统。
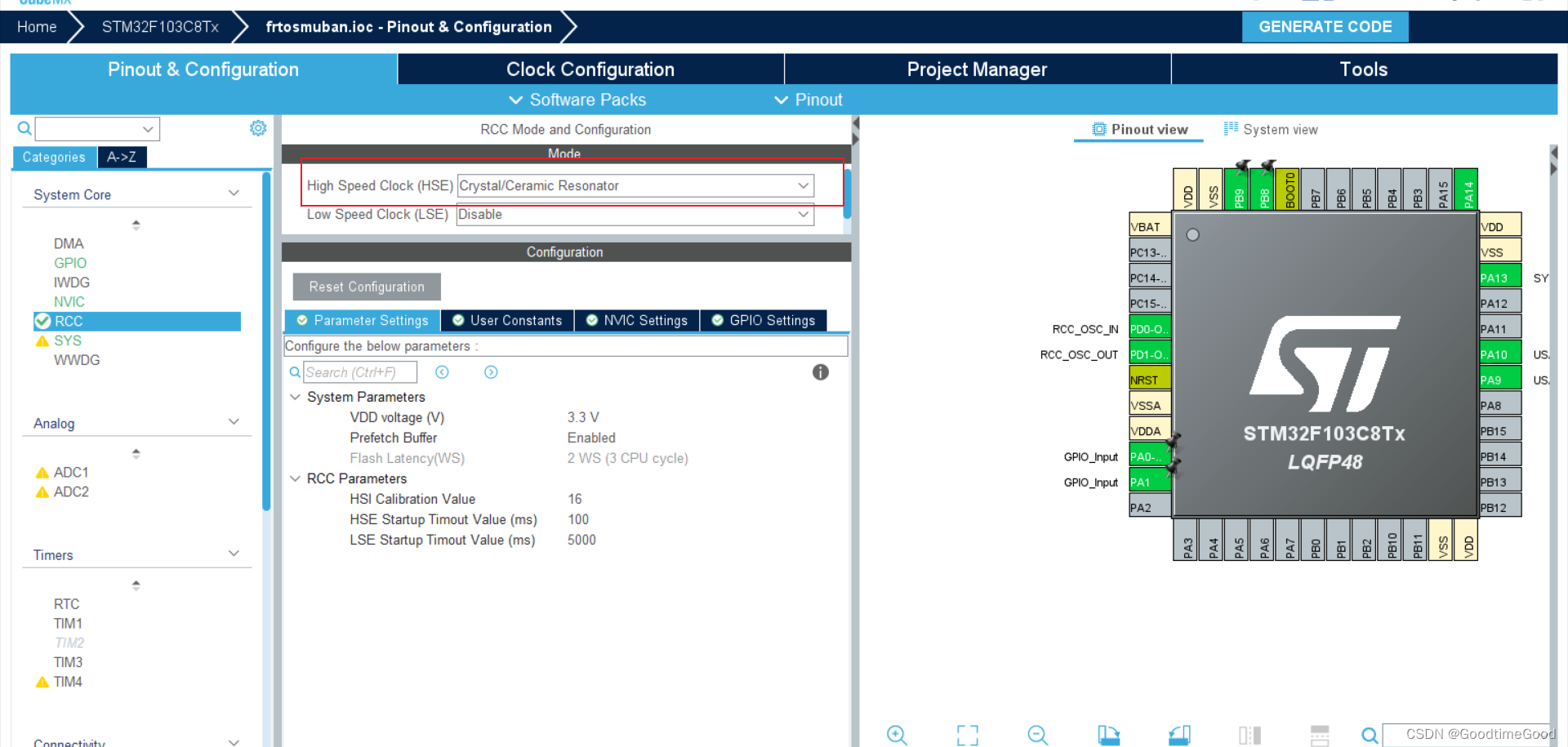
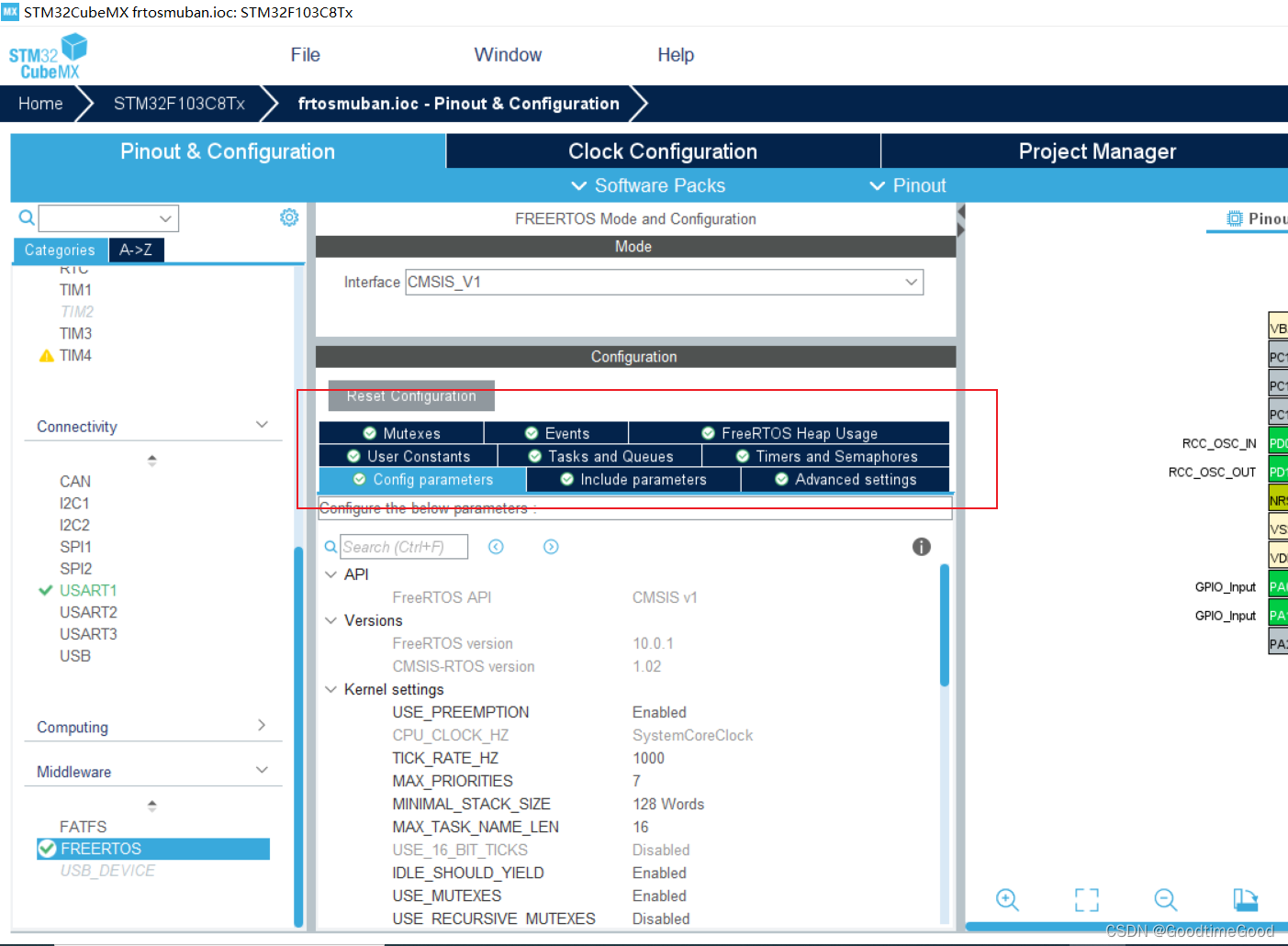
二、移植FreeRTOS到STM32F103C8T6上
interface选择CMSIS_V1,RCC选择Crystal Ceramic Resonator 。
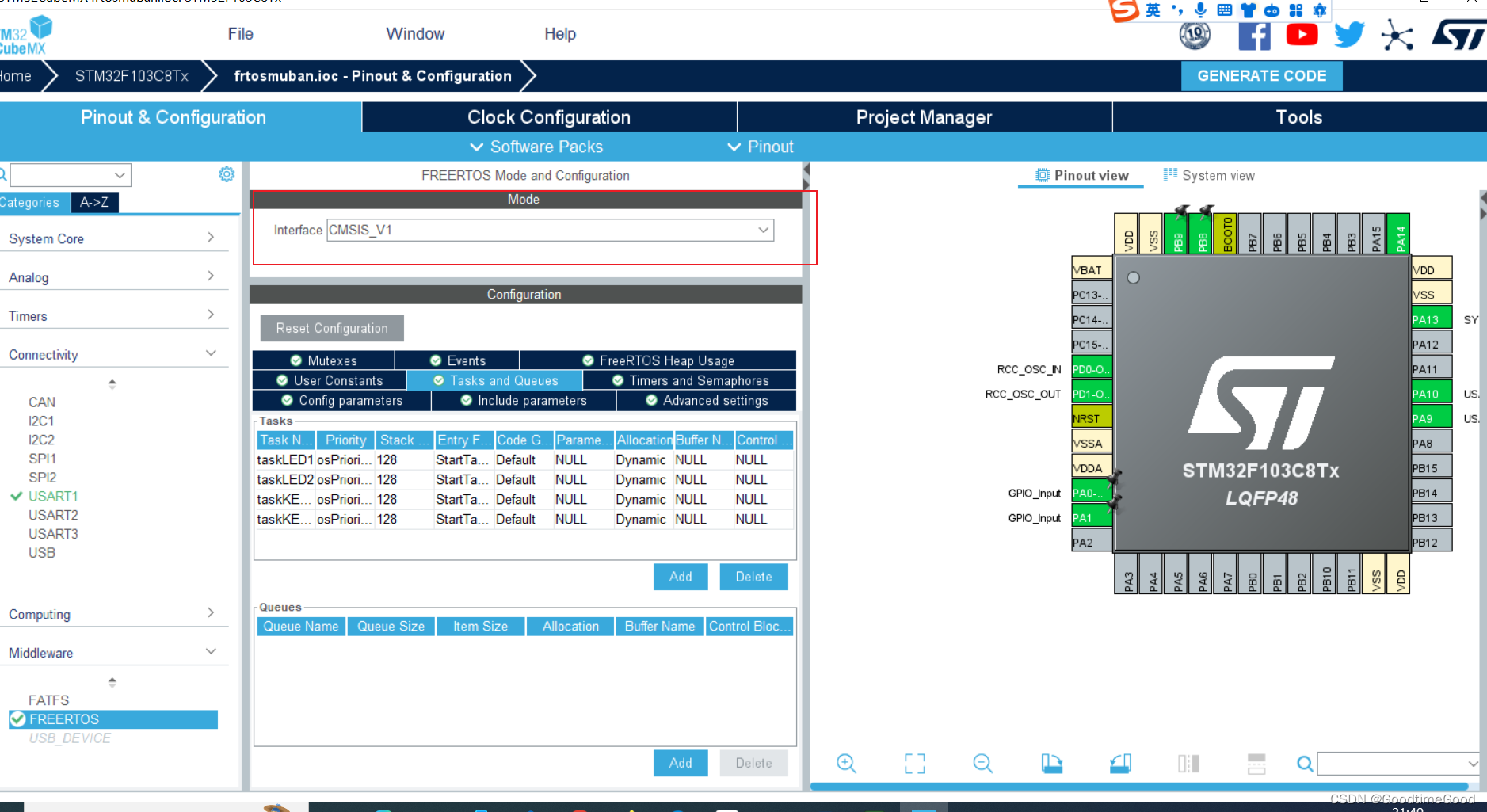
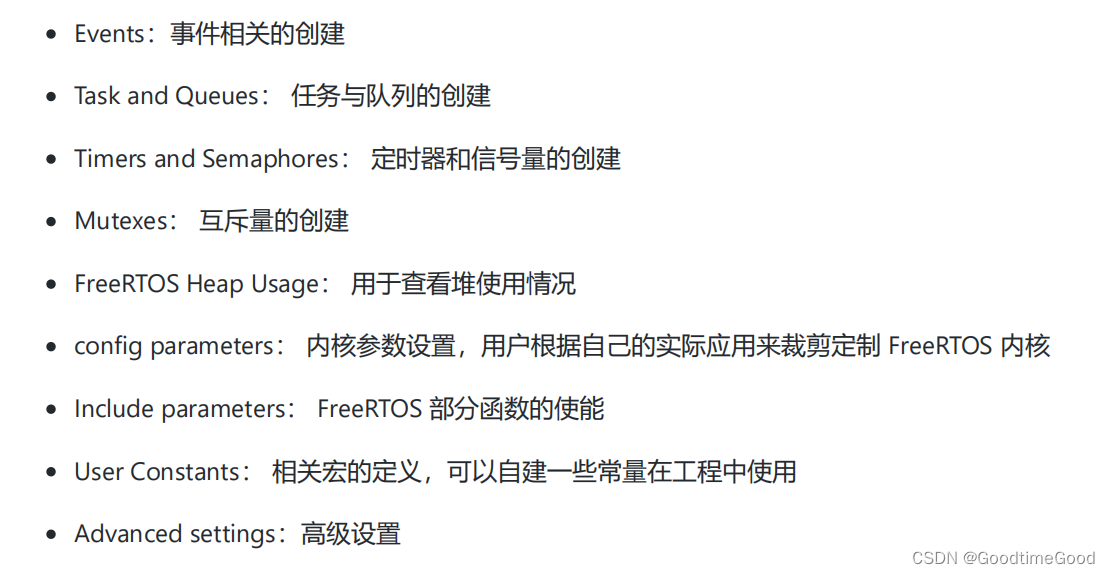
FreeRTOS相关创建部分
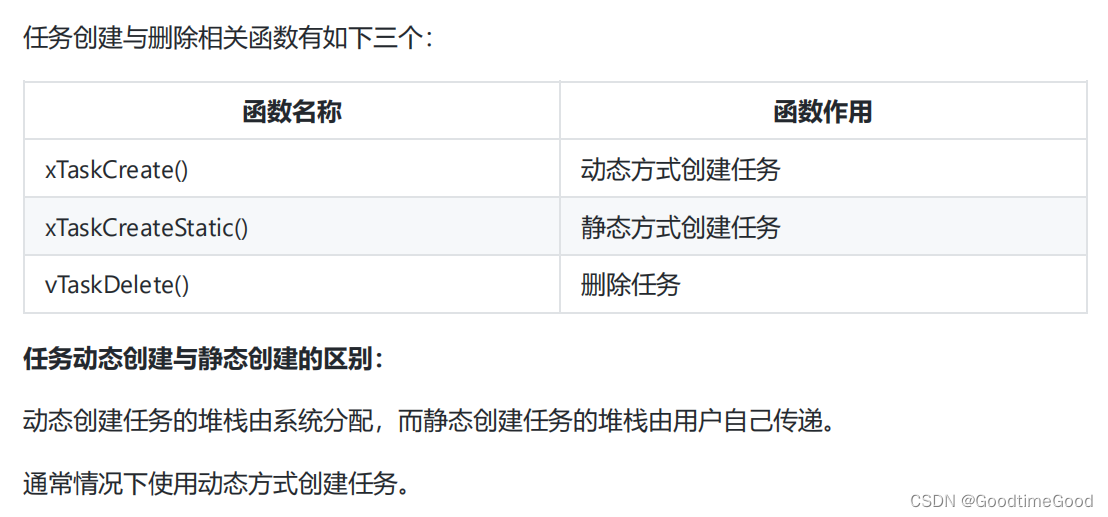
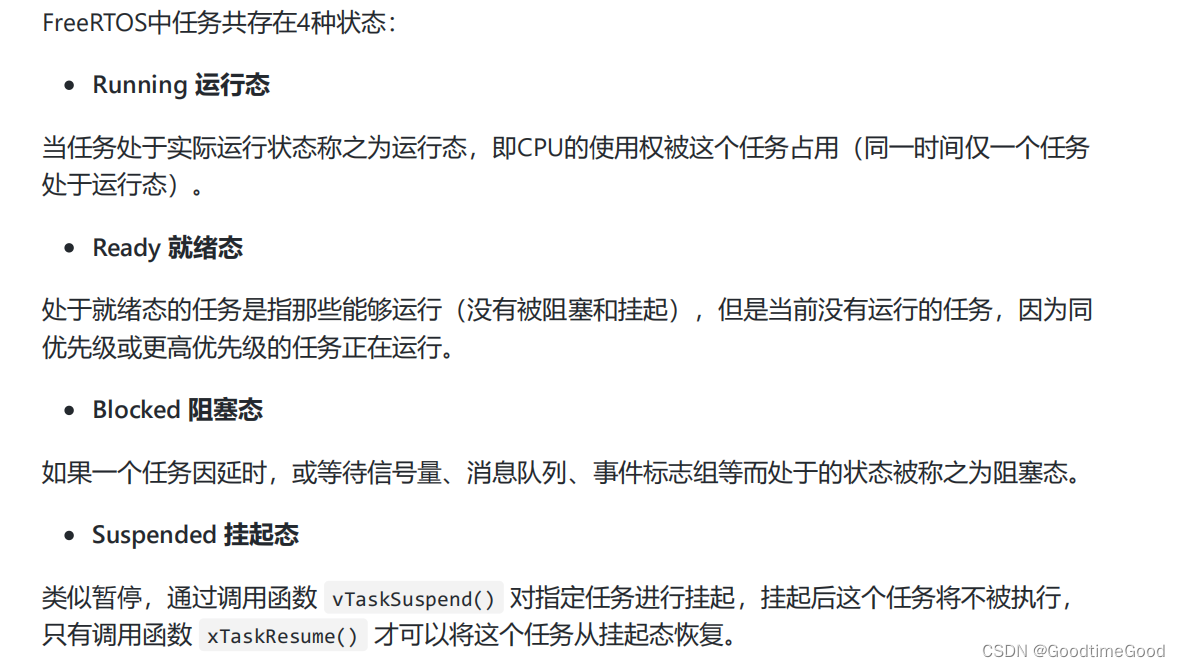
三、任务的创建与删除相关函数,FreeRTOS任务的状态
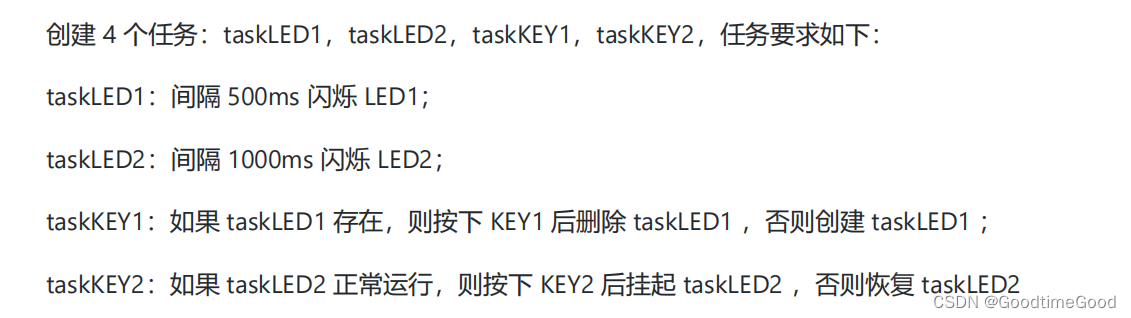
五、任务小实验
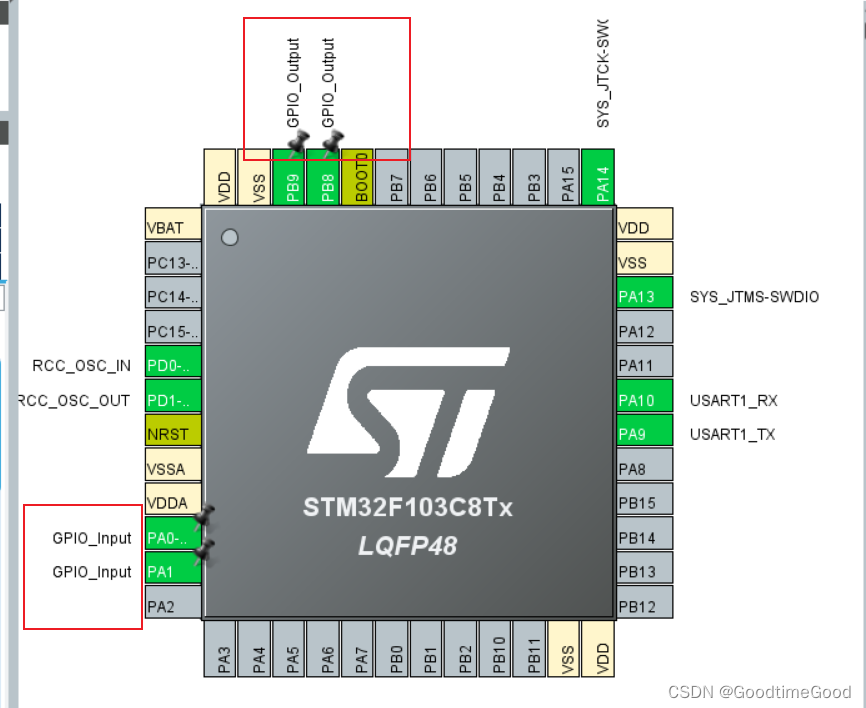
LED1和LED2引脚设置成Ooutput,KEY1和KEY2引脚设置成Input
LED1和LED2功能实现代码:
void StartTaskLED1(void const * argument)
{
for(;;)
{
HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_8);//HAL_GPIO_TogglePin实现电平反转,PB8控制LED1
osDelay(500);
}
}
void StartTaskLED2(void const * argument)
{
for(;;)
{
HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_9);
osDelay(1000);
}
}
KEY1和KEY2功能实现:
void StartTaskKEY1(void const * argument)
{
for(;;)
{
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==GPIO_PIN_RESET)//KEY1为PA0
{
osDelay(20);
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==GPIO_PIN_RESET)
{
printf("key1被按下!!!\r\n");// \r为回车符,\n为换行符
if( taskLED1Handle == NULL){
printf("任务1不存在,准备创建任务1\r\n");
osThreadDef(taskLED1, StartTaskLED1, osPriorityNormal, 0, 128);
taskLED1Handle = osThreadCreate(osThread(taskLED1), NULL);
if(taskLED1Handle != NULL)
printf("任务1创建成功\r\n");
}else{
printf("删除任务1\r\n");
osThreadTerminate(taskLED1Handle);
taskLED1Handle = NULL;
}
}
while(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==GPIO_PIN_RESET);//设置死循环,防止按键按下后一直执行下去
}
osDelay(1);
}
}
void StartTaskKEY2(void const * argument)
{
static int flag = 0;//设置标志位
for(;;)
{
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1)==GPIO_PIN_RESET)
{
osDelay(20);
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1)==GPIO_PIN_RESET)
{
printf("key2被按下!!!\r\n");
if( flag == 0){
osThreadSuspend(taskLED2Handle);
printf("任务2已暂停\r\n");
flag = 1;
}else{
osThreadResume(taskLED2Handle);
printf("任务2已恢复!!!\r\n");
flag = 0;
}
}
while(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1)==GPIO_PIN_RESET);
}
osDelay(1);
}
}
更多【编程技术-FreeRTOS知识梳理】相关视频教程:www.yxfzedu.com
相关文章推荐
- 编程技术-rt-hwwb前端面试题 - 其他
- node.js-Vite和Webpack区别 - 其他
- python-python用pychart库,实现将经纬度信息在地图上显示 - 其他
- node.js-Electron-vue出现GET http://localhost:9080/__webpack_hmr net::ERR_ABORTED解决方案 - 其他
- web安全-APT攻击的特点及含义 - 其他
- 51单片机-51单片机应用从零开始(二) - 其他
- objective-c-【Objective-C】Objective-C汇总 - 其他
- 云原生-SpringCloud微服务:Eureka - 其他
- react.js-react+星火大模型,构建上下文ai问答页面(可扩展) - 其他
- node.js-taro(踩坑) npm run dev:weapp 微信小程序开发者工具预览报错 - 其他
- 云原生-Paas-云原生-容器-编排-持续部署 - 其他
- 网络-漏洞扫描工具的编写 - 其他
- 组合模式-二十三种设计模式全面解析-组合模式与迭代器模式的结合应用:构建灵活可扩展的对象结构 - 其他
- java-【Proteus仿真】【51单片机】多路温度控制系统 - 其他
- java-【Vue 透传Attributes】 - 其他
- github-在gitlab中指定自定义 CI/CD 配置文件 - 其他
- 编程技术-四、Vue3中使用Pinia解构Store - 其他
- apache-Apache Druid连接回收引发的血案 - 其他
- 编程技术-剑指 Offer 06. 从尾到头打印链表 - 其他
- 编程技术-linux查看端口被哪个进程占用 - 其他
记录自己的技术轨迹
文章规则:
1):文章标题请尽量与文章内容相符
2):严禁色情、血腥、暴力
3):严禁发布任何形式的广告贴
4):严禁发表关于中国的政治类话题
5):严格遵守中国互联网法律法规
6):有侵权,疑问可发邮件至service@yxfzedu.com
近期原创 更多