无人机-超维空间S2无人机使用说明书——41、使用3维雷达进行室内定位——仿真篇(跑数据集)
推荐 原创引言:为了提高无人机室内定位的稳定性和多种定位方案,S系列无人机推出了基于三维雷达激光点云数据的定位方案。该方案的提出是为了改善视觉定位容易受到光照等影响导致的位置漂移。
简介
定位采用fast-lio定位算法,通过修改源码直接发布定位出来的位置信息和速度等信息。该算法主要依赖CPU的运算速度,因此需要选择合适的主控进行开发即可。
硬件:宇树雷达4DLiDAR L1 PM,ROS主控Jetson orin nano 8G
环境:ubuntu20.04,ros-noetic
步骤一: 启动fast-lio定位算法
roslaunch fast_lio mapping_velodyne.launch
等待出现如下界面,表明启动成功

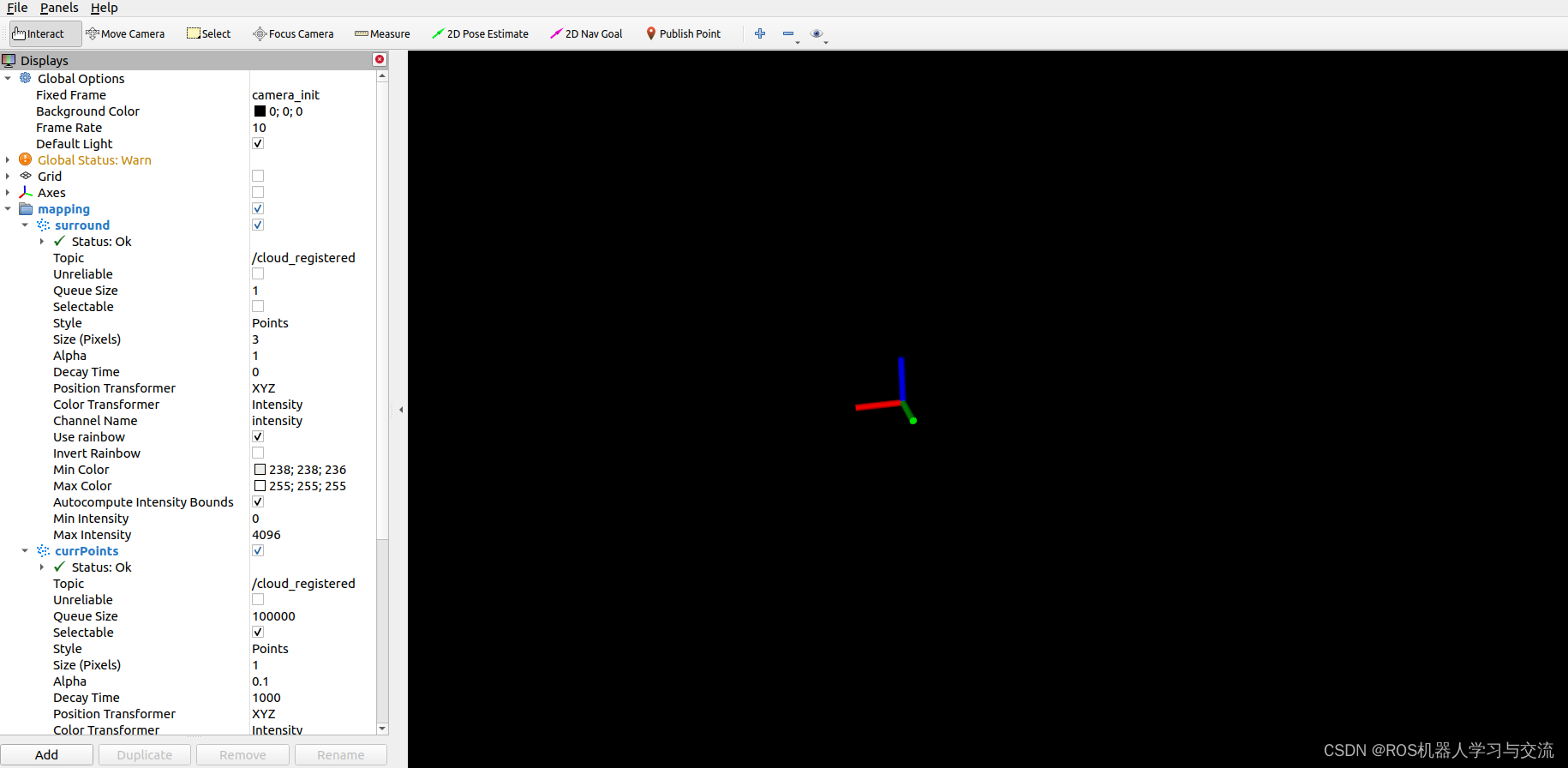
同时会自动开启RVIZ,如下
步骤二:播放数据集
注意:需要到对应数据集目录下再进行如下指令操作,我的数据集在home目录下
rosbag play demo01_velodyne.bag

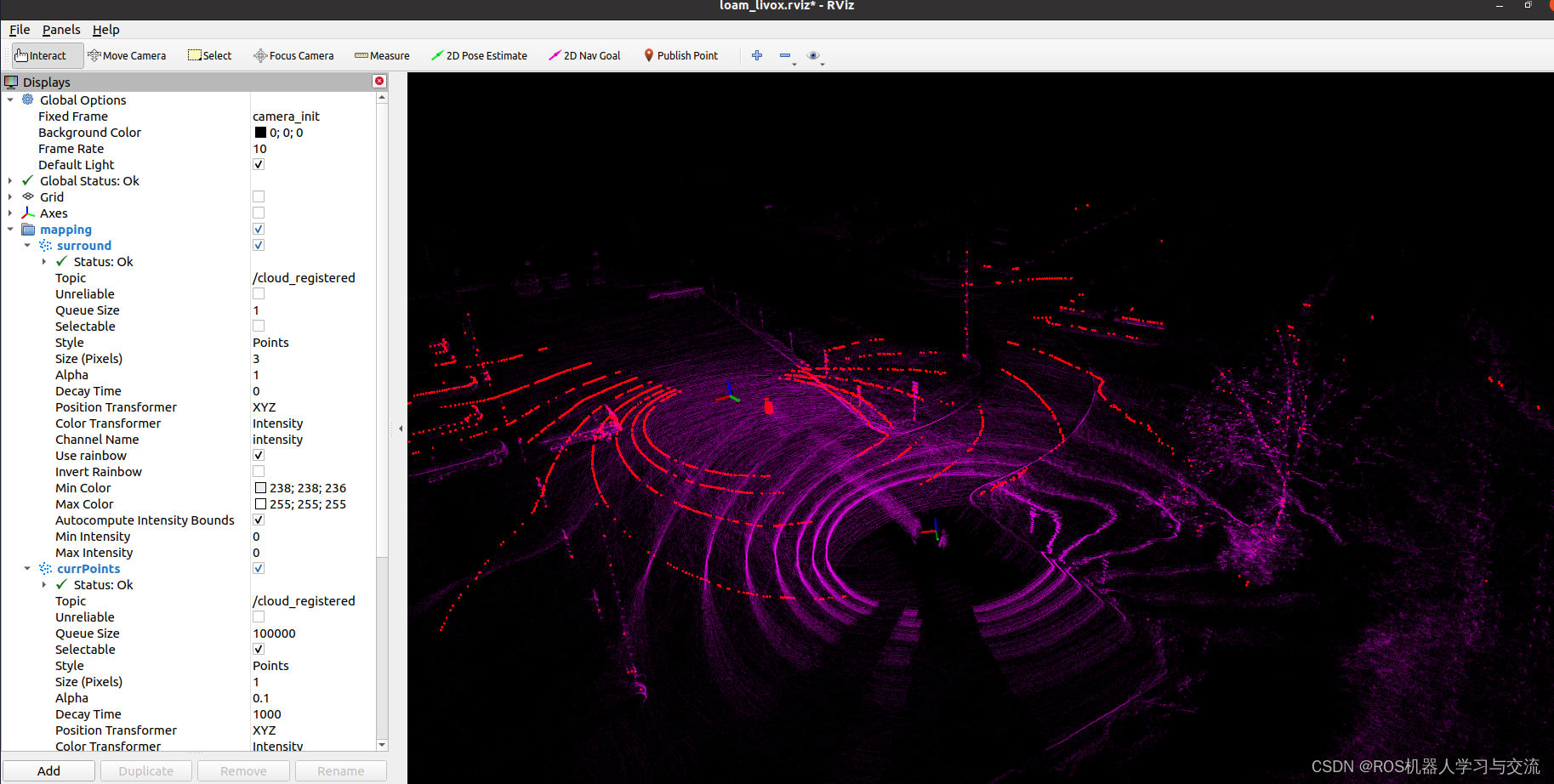
步骤三:查看RVIZ中的激光点云图
步骤四:查看定位出来的里程计信息
(1)、查看里程计话题名称
rostopic list
话题/Odometry就是雷达定位出来的里程计话题
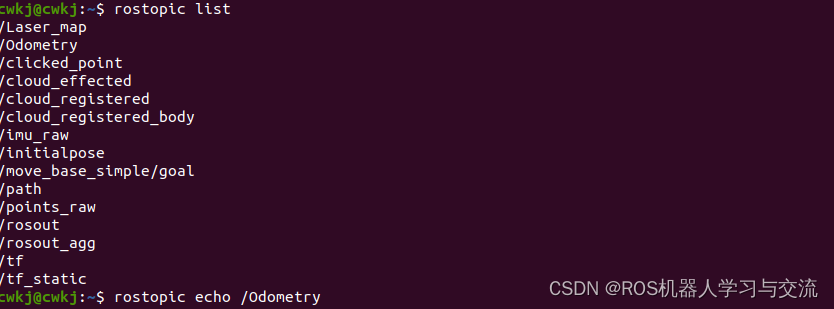
(2)、打印里程计数据
rostopic echo /Odometry
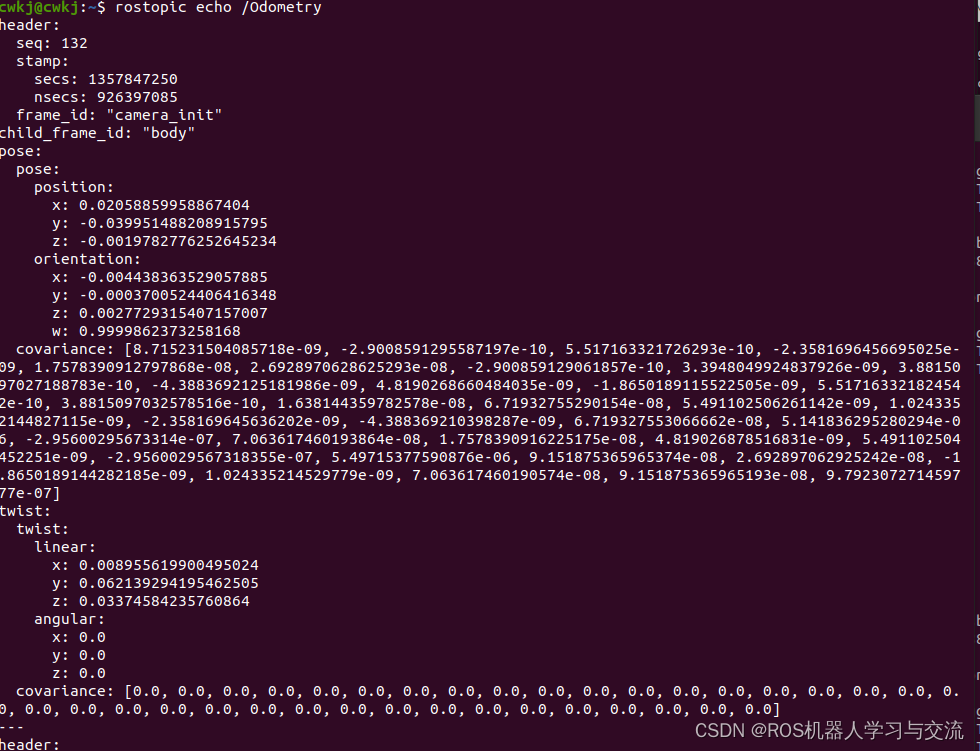
总结:一般来说仿真数据集正常运行,表明环境配置正常。在下一小节中,我们只需要给出正确的激光scan数据即可。
建议,在不熟悉算法的情况下,最好是先进行仿真,在熟悉了流程以后在进行实物的操作,既提高了学习效率,也可以避免硬件的损坏
更多【无人机-超维空间S2无人机使用说明书——41、使用3维雷达进行室内定位——仿真篇(跑数据集)】相关视频教程:www.yxfzedu.com
相关文章推荐
- 编程技术-如何提高企业竞争力?CRM管理系统告诉你 - 其他
- java-Java - Hutool 获取 HttpRequest:Header、Body、ParamMap 等利器 - 其他
- c++-C++特殊类与单例模式 - 其他
- 编辑器-vscode git提交 - 其他
- 前端-WebGL的技术难点分析 - 其他
- c++-【c++之设计模式】组合使用:抽象工厂模式与单例模式 - 其他
- python-【JavaSE】基础笔记 - 类和对象(下) - 其他
- github-Redis主从复制基础概念 - 其他
- 运维-【iOS免越狱】利用IOS自动化WebDriverAgent实现自动直播间自动输入 - 其他
- 前端-AJAX-解决回调函数地狱问题 - 其他
- html5-HTML5的语义元素 - 其他
- html5-1.2 HTML5 - 其他
- hive-项目实战:抽取中央控制器 DispatcherServlet - 其他
- kafka-Kafka(消息队列)--简介 - 其他
- github-github 上传代码报错 fatal: Authentication failed for ‘xxxxxx‘ - 其他
- matlab-【MATLAB源码-第69期】基于matlab的LDPC码,turbo码,卷积码误码率对比,码率均为1/3,BPSK调制。 - 其他
- 爬虫-Python 爬虫基础 - 其他
- ui-Qt6,使用 UI 界面完成命令执行自动化的设计 - 其他
- 物联网-基于STM32的设计智慧超市管理系统(带收银系统+物联网环境监测) - 其他
- python-【Python基础】 Python设计模式之单例模式介绍 - 其他
记录自己的技术轨迹
文章规则:
1):文章标题请尽量与文章内容相符
2):严禁色情、血腥、暴力
3):严禁发布任何形式的广告贴
4):严禁发表关于中国的政治类话题
5):严格遵守中国互联网法律法规
6):有侵权,疑问可发邮件至service@yxfzedu.com
近期原创 更多
